Ducati soft-announced its blind-spot radar project at an Institute of Electrical and Electronics Engineers (IEEE) conference in Redondo Beach, California, last year. The blind-spot warning function will actually be part of a two-radar system that will also allow riders to engage Adaptive Cruise Control (ACC).
When I knew that I was going to be in Bologna this summer, one thing I wanted to do was learn more about Ducati’s first use of radar.
Ducati’s R&D chief, Pierluigi Zampieri, assigned two of his engineers to get me up to speed. I met with Luca Zanovello, Ducati’s top vehicle safety specialist, and Marco Ciabani, an electronics engineer working on the radar project. (Andrea Seltmann, from the communications team, sat in on our meeting and occasionally looked worried as our conversation drifted further afield!)
Here’s our conversation, minimally edited for readability.
Common Tread: How did the radar [blind-spot warning] project get started?
Luca Zanovello: The way I usually try to fund my projects is by aligning with national or European research projects, or universities, or forming consortiums with other OEMs or tier-one suppliers. The radar project began in 2016, when we initiated a research project with Politecnico di Milano [Milan Polytechnical University].
CT: When will the first Ducati with a blind-spot radar system be sold?
Luca: At the beginning of 2020.
CT: What model will get the first radar? Will have it as standard equipment, or will it be can option?
Luca: [Awkward pause] I don’t know what the business plan is.
CT: Why did Ducati choose this particular [blind-spot] function? Is it because that type of accident is particularly common, or because it was a relatively easy problem to solve?
Luca: This was a useful function. We’ve explored other technologically mature functions from the automotive world that we didn’t think would be useful enough for motorcycles, so this was an easier decision for us.

Marco Ciabani: We have problems integrating these functions into motorbikes, so we have to make sure that we have a development history that identifies all the main problems of such systems. For sure, we’ll face all the same problems that cars have faced. For example, there are some well known problems with object identification in radars. Cars don’t just use one radar, they use a lot of different sensors, so it’s much easier for them to have a clear view of what’s happening outside the car. For motorbikes, it’s more complicated. We don’t have the space, we don’t have enclosed places to locate hardware.
CT: Ducati is a member of the Connected Motorcycles Consortium (CMC). Is this project a first step towards motorcycles that will be much more aware of cars, other road users, and infrastructure?
Luca: Yes and no. Radar functions are stand-alone functions, while connected functions depend on communication between vehicles. I can’t say that our radar function is really related to our work with the CMC. What I can say is that with radar, the motorcycle is more aware of the surrounding environment and is able to detect other vehicles and prevent some critical situations.
CT: Are there key suppliers, such as Bosch or Magneti-Marelli, that are working closely on the radar project?
Luca: Yes, but at Ducati we want to explore the functionality by ourselves, or in cooperation with some university. The first phase of this project was funded by Ducati and conducted by Politecnico di Milano. Once we had proof that the concept works well, then we found a key supplier. In this case, it’s Bosch.

CT: Is Audi also a partner in this project?
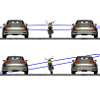
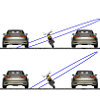
Luca: Yes (laughing). But the automotive industry is huge; we’re the little brother. And it’s not only about being smaller. Motorcycles have peculiar dynamics, so the radar functions that work for Audi won’t just plug and play. For example, it’s easy to design a radar system that works when the motorcycle is upright, but when it’s leaned over, the radar beam is out of plane (looking at the ground on one side, and the sky on the other).
When I talk to European Commission officers, for example, they say, “It should be so easy. Just do what cars do,” but this is really a difficult problem, and an example of the reasons that car solutions may never be applied to motorcycles.


CT: Did you solve that problem by creating some kind of radar that knows the bike’s lean angle and corrects for it?
Marco: It would be relatively easy to create a device that held itself level, but the challenge is that when you lean the bike, some motorcycle components might interfere with the radar beam. It’s not so easy to integrate the radar into the bike. You need to make something that both works well and looks good. You need to be sure that parts of the bike, such as brake lights and turn signals, won’t enter the cone of the radar.
For sure there are mechanical (self-leveling) solutions, but an alternative is an algorithm that looks at objects in the beam and can ignore them if they’re moving in a way that’s consistent with changes in the motorcycle’s lean angle. We’re looking at an algorithm solution.
CT: This is a new step, into a higher level of ARAS. What should we expect to see next?
Luca: When we do research, we take an analytical approach, and explore anything and everything. From research projects on passive safety, to a European Commission project called Pioneers, that we started last May, which is a project specifically dedicated to powered two-wheeler (PTW) riders. Personal protective equipment manufacturers are developing new and better helmets and jackets. In Europe, they’re modifying the standards, and really taking a big step. [As part of that project] Ducati and Piaggio are looking at mitigating side impacts.
CT: That sounds like a major change to bodywork...
Luca: Piaggio’s examining crushable structures. We are more looking at inflatables.
This is one area of passive safety, but we’re also looking at active safety, and vehicle-to-vehicle communication.
CT: What is the current regulatory environment? Is there a timetable or EU mandate for adding V2V capability for motorcycles?
Luca: No.
CT: But it sounds as if you assume motorcycles will be connected in the future…
Luca: Yes, but when? Look at eCall — motorcycle manufacturers have been working on that for 10 years. It’s mandatory for new cars. For motorcycles, there’s been a first deployment [by BMW] and we’re looking at various solutions, but there is no standard yet. There are some projects to define a standard, and the European Commission is saying, “OK, by 2021, we’ll see how it’s working for cars and then we’ll define a standard for motorcycles.”
With V2V, there’s still no standard for cars, so first they will make it mandatory for cars, then they’ll see, and ask motorcycles to comply.

CT: What is Ducati’s position on the costs, benefits, and challenges of operating in a connected environment?
Luca: We think V2V will be a big step for rider safety. Around 50 percent of accidents between motorcycles and cars happen in intersections, in left turns, or while overtaking. Our radar function will reduce accidents related to overtaking, but for the other two, we think that adding a system where the motorcycle will communicate its position and speed to cars, so that cars can avoid the accident, will be really useful.
When you ask car drivers what they think of motorcycle riders, they say, “It’s always their fault,” but about 65 percent of accidents happen because the drivers weren’t looking.
Of course the problem is that until at least 20 percent of all road vehicles are equipped with V2V systems, you’re spending money to put a system on the bike that won’t [statistically] improve safety. From that point of view, OEMs have to invest. That’s what Volkswagen is doing. Beginning next year, three or four models will have a G5 unit [similar to the DSRC V2V system that currently exists in a sort of regulatory limbo in the United States].
CT: Other motorcycle makers have at least tested Automatic Emergency Braking functions. Does Ducati see a future in which at least some riders are willing to give up that much control?
Luca: I think that motorcycle riding — especially the kinds of motorcycles that Ducati makes — is a source of pleasure. You ride because you want to ride. But it’s possible to have some automated functions that don’t interfere with the pleasure of riding. I think you will see functions that, in limited time frames, will intervene to prevent crashes, like emergency braking, or forward collision warning.
CT: Have either of you actually used the radar blind-spot system?
Marco: We’ve tried it and have a strong feeling about how it will work.
CT: Will it signal the presence of a car in your blind spot with flashing LEDs in the rearview mirrors, like the Bosch system I’ve seen for scooters?
Luca: That’s an option, for sure, but the HMI [Human-Machine Interface] part of the system is still a work in progress. We’re exploring other things, too.

Marco: It’s a totally different problem for motorcycles than it is for passenger cars. In a car, the driver hears a warning sound — a beep — that would be useless for motorcycles. The challenge is to determine what the best feedback is, for the rider. We’re researching the best, simplest way to communicate those messages.
CT: Will the radar exist as a stand-alone function — as a separate box — or will the bike’s main computer now have an extra task, to analyze data from the radar and decide whether or not the rider should get a warning?
Marco: Let’s say that the complete functionality is split between the radar unit and other units that will use the feedback from the radars to implement some function. Sometimes it’s easy, sometimes it’s not. Consider Adaptive Cruise Control. It’s not just about seeing the obstacle, it’s interfacing with all the bike — the engine and all other systems. But the brain for all the functionality is usually placed somewhere else.
CT: From the way you’re talking about it, it sounds as if I should expect to see Automatic Emergency Braking on a Ducati in the medium term…
Luca: The barriers are not technical. We’re working on passive safety, active safety, rider monitoring, and human factors. If you create the best function and the rider doesn’t want to use it, or refuses to use it, it’s useless. For example, the problem with Automatic Emergency Braking is rider reaction. That’s why with the University of Florence, we’re making some tests to see how riders will respond to such a system.
CT: I attend meetings like ITS Detroit, and as a motorcyclist I’m frustrated that car companies won’t deploy technology that will improve safety, because they feel that those technologies are not yet perfect. Safety’s more important to us, because we’re 20 times as vulnerable. Are you ever frustrated by the pace of deployment?
Luca: Honestly, we have a similar approach. When you talk about safety, it’s delicate. The first thing you consider is the number of bad cases. I understand them completely. Ducati and all the other PTW manufacturers work the same way.
Marco: You have to consider what is happening with autonomous driving, which is probably going to deliver the biggest safety improvements we’ve ever seen, but we’re still having problems with false positives and false negatives.
Remember what Ducati did with ABS. We started with a rough version, but now we have cornering ABS on almost all our models — and there are still riders who don’t want it, but I hope that most riders realize it improves their safety.
So, what does all that mean?
It’s interesting that Bosch, a reliable Ducati technical partner, already has a commercialized blind-spot warning system for motorcycles and scooters, using ultrasonic sensors, but Ducati set out to develop its own system. Why go to all that trouble?
Bosch’s ultrasonic system has an effective range of 25-30 feet and Bosch claims it is reliable at speeds from 15 to 50 mph, where closing speed differences are small. In other words, it should work well in most city-traffic situations. It’s likely that Ducati chose to develop a radar-based system that could detect vehicles farther out, enabling the system to work reliably at highway speeds and with higher closing speeds.

Although every PTW blind-spot warning system I’ve ever seen demonstrated puts the warning on the bike’s mirrors, Zanovello created the impression that Ducati still has not settled on the best means of warning riders about vehicles in their blind spots. The company will have to make a decision soon if it’s to meet its goal of putting the first radar-equipped model on the market in 2020!
I left the meeting with the strong impression that Ducati is treating the blind-spot system and ACC as a next step into a more comprehensive suite of safety and Advanced Rider-Assistance Systems (ARAS.)
Old-fashioned cruise control systems manage the engine only, but Ducati’s Adaptive Cruise Control will also use a new generation of ABS system that can increase pressure in both brake channels independently. The motorcycle will be capable of applying the brakes by itself.
For now, in ACC mode, we can assume brake applications will be gentle. But what about in the future? Ducati is researching Automatic Emergency Braking. Motorcyclists are less likely to be distracted than car drivers, and as such are less likely to need Forward Collision Warning and/or AEB. The unexpected application of the brakes carries its own risks for riders who, unlike car drivers, are not restrained to their seats. However, considering that all the basic hardware needed for an FCW/AEB function will soon be present on some Ducatis, I would not be surprised to see a Ducati equipped that way within a few years.
More motorcycle airbags?
The side impact mitigation project Luca tipped is even more futuristic.
According to the European Union’s Community Research and Development Information Service, “[S]cooters and motorcycles are often cited as an appropriate transport solution for Europe’s increasingly congested urban environments. However, alongside their maneuverability, specially suited to city traffic, comes increased risk of personal injury or fatality, through crashes.” With this in mind, the EU has funded a research program called Pioneers, with a goal of reducing rider risk.
As part of the Pioneer project, Ducati and Piaggio are both searching for ways to mitigate side impacts. Given Ducati’s proven interest in inflatables (Ducati Multistradas can already communicate with Dainese D-Air gear to reduce deployment times in a crash) it’s perhaps unsurprising that Ducati’s research will focus on an inflatable.
Because automobiles benefit from deformable crash structures that attenuate impacts, and because auto passengers have an air space in front of them, an air bag that takes 0.05 seconds to deploy can prevent many injuries. However, the first point of contact in a side impact with a motorcycle is the rider. Inflatable protection can’t wait for impact, because even in a 20 mph impact, the rider’s leg will deflect about 16 inches in 0.05 seconds.
That means a motorcycle side-impact system must deploy in anticipation of an impact. Considering that our conversation began with the topic of radar, it’s easy to imagine a Ducati with some type side-looking radar capable of deploying an air bag (a side-curtain bag on the bike, or protective clothing, hmm?..) just before impact.

Beyond protection: Communication
Right after my conversation with Luca and Marco, Ducati participated in a public demonstration of a new cellular vehicle-to-everything (C-V2X) system that could dramatically improve motorcycle safety, although ironically the companies that are pushing C-V2X solutions for vehicle-to-vehicle safety systems are actually slowing the deployment of an existing V2V system.
V2V safety will trickle down to motorcycles from the auto industry. In that world, GM, Toyota, and Volkswagen have committed to deploying the well-proven DSRC technology that I described last fall. But since then some companies — including Ducati’s parent, Audi, in partnership with the American chip-maker Qualcomm — have been pushing hard for the auto industry to standardize on a different technology platform, which relies on a developmental 5G version of mobile phone technology.
As a motorcyclist, I’m aware that we’re at least 15 times as vulnerable as car drivers, so I personally favor whatever V2V system that can be in-market soonest. That’s DSRC. However, Audi believes that in the long run, the C-V2X standard will be more versatile. It’s a complicated issue fraught with politics and (perhaps unsurprisingly) profit motives.
No matter which V2V communications standard prevails, DSRC or C-V2X will be good for us. It can’t happen soon enough for me, but realistically we’re at least five years from the first V2V-equipped bikes, and a decade away from the the time when most vehicles are carrying any kind of V2V safety beacon.
That’s why projects like Ducati’s blind-spot warning system, that can make us a little safer right away, are so welcome.